안녕하세여 블로그는 오랜만이네요,,,
벌써 그로쓰가 끝나가고 있다니 믿겨지시나요~(;´д`)ゞ
저번 스타트 때 작성했던 글을 보니 저도 PID 제어에 대해 알아보고 공부하던 시기라
개념적인 부분 위주로 많이 설명을 했었네요,,
이번에는 실제로 드론을 연결해서
PID 적용하는 결과까지의 과정에 대해 좀 더 자세하게 적어보려고 합니다ㅎ,ㅎ
텔로를 잘 아시는 분들이라면 텔로에는 비젼 포지셔닝이 있는데 왜 PID 제어를 하지? 라고 생각하실 수도 있을 것 같습니다.
저희도 스타트-그로쓰학기를 진행해오면서 위의 기능이 내장되어 있는 것을 발견하여 해당 기능을 사용할까 하다가 아래와 같은 제한사항을 발견하게 되었습니다.


적외선 모듈을 이용해서 그런지 물 또는 투명한 표면 위로 비행하는 경우에 해당 기능이 작동하지 않을 수 있다고 합니다.
물 위에서 작동해야 하는 SeeSea 이기 때문에, 기존에 적용하려고 했던 PID제어 개발을 계속 진행하기로 했습니다.
개발 환경 구축
텔로 에듀는 교육을 목적으로 나온 드론이기에 자체 앱을 통해서 핸드폰으로도 간단하게 조종이 가능하나, pid제어를 위한 코드를 python으로 작성할 것이기 때문에 그에 맞는 환경을 구축해줍니다.
1. pycharm 설치
해당 사이트에 들어가서 pycharm IDE를 설치해줍니다.
(기존에 python을 사용하시 않으셨던 윈도우 유저라면 python도 설치해야합니다!!)
https://www.jetbrains.com/ko-kr/pycharm/download/#section=mac
PyCharm 다운로드: JetBrains가 만든 전문 개발자용 Python IDE
www.jetbrains.com
2. 프로젝트 생성 및 모듈 import
a) 새 프로젝트 생성
pycharm을 실행 -> 파일 -> 새 프로젝트를 눌러 새로운 프로젝트를 생성합니다.

b) dji tello 모듈 import
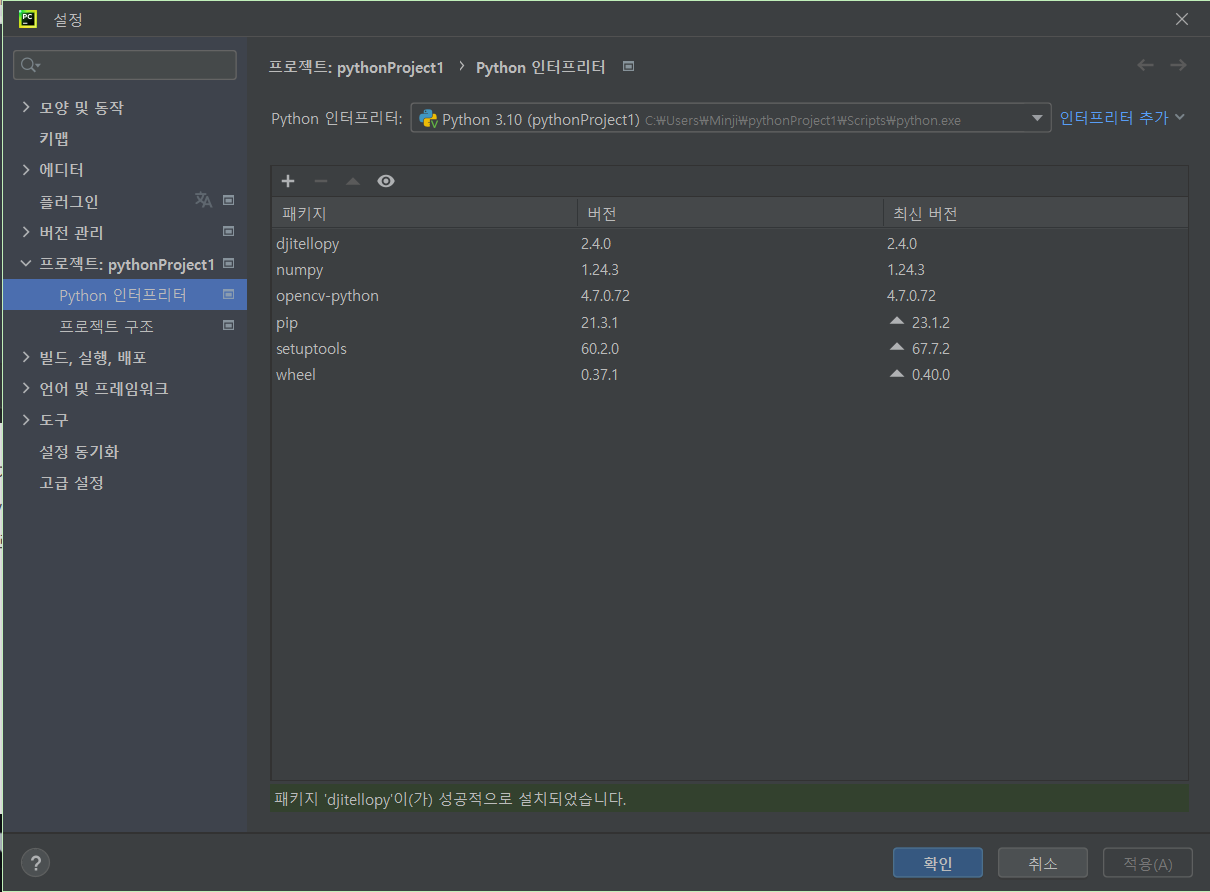
파일 -> 설정 -> 프로젝트 탭에 들어간 후 + 버튼을 클릭합니다.

버튼을 클릭하면 아래와 같은 창이 나타나는데 그 중 djitellopy를 찾아 설치해주시면 됩니다.

djitellopy를 설치하면 자동으로 numpy와 oepncv도 설치됩니다.
만약 안깔렸다면 이것도 설치해주세요!
이렇게 환경 구축을 마쳤습니다!!(간단하져?!~)
드론 - 노트북 연결
드론 전원을 킨 후에 노트북에서 와이파이 검색을 하면 TELLO 연결을 위한 와이파이를 발견할 수 있습니다.
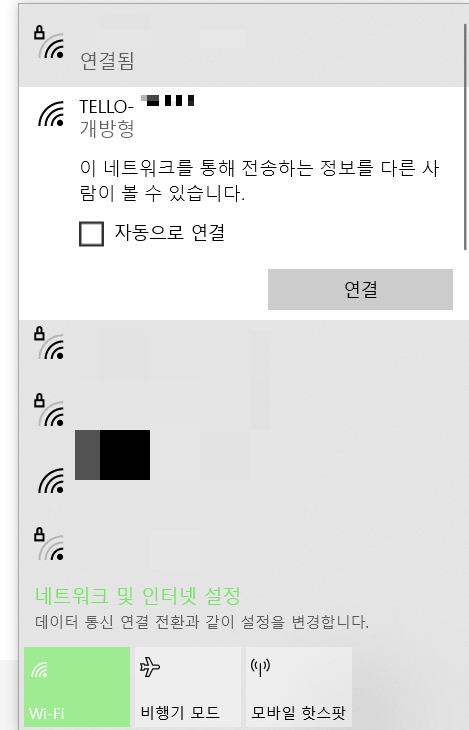
TELLO-XXXXX 와 같이 뜨게 되는데 해당 와이파이와 연결해주시면 됩니다~~
이렇게 연결을 하면 노트북과 드론이 통신하기 위한 준비를 마쳤습니다.
이후에 코드에 있는 connect가 실행되면 코드를 통해 드론을 조종할 수 있습니다.
이중 PI 제어 적용
이전 포스팅에서 말한 것 처럼,
P 제어는 비례 제어
$${P=K_{p}*Error}$$
I 제어는 적분 제어
$${I=K_{i}*\int_{0}^{t}Error dt}$$
입니다.
이전 스타트때 적었던 내용처럼 기존의 PI 제어는 목표 위치와의 위치차이를 ERROR 값으로 설정하였는데 이중 PI를 적용하며 ERROR 값을 다르게 설정하였습니다.
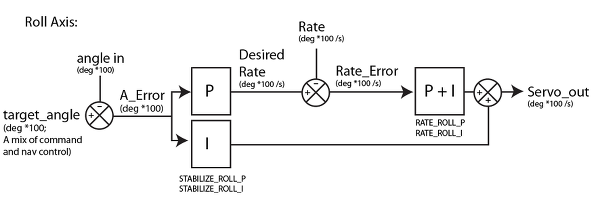
이중 PI 제어를 보면 크게 2파트로 나눌 수 있는데요,
바로
각도에 대한 PI 제어 부분
과
각속도에 대한 PI 제어 부분
으로 나눌 수 있습니다.
또한, 이에 따라 계산에 사용하는 ERROR 값이 달라집니다.
1) 기존의 PID 제어와 유사하게 목표 각도와 현재 각도의 차이를 ERROR 값으로 하여 P 제어를 적용합니다.
2)P 제어로 도출된 값을 각속도 목표값으로 하여 현재 각속도와의 오차를 구해 PI 제어를 진행합니다.
위의 내용들을 바탕으로 작성한 코드의 일부를 첨부하도록 하겠습니다.
전체 코드는 깃허브를 참고해주세요~!
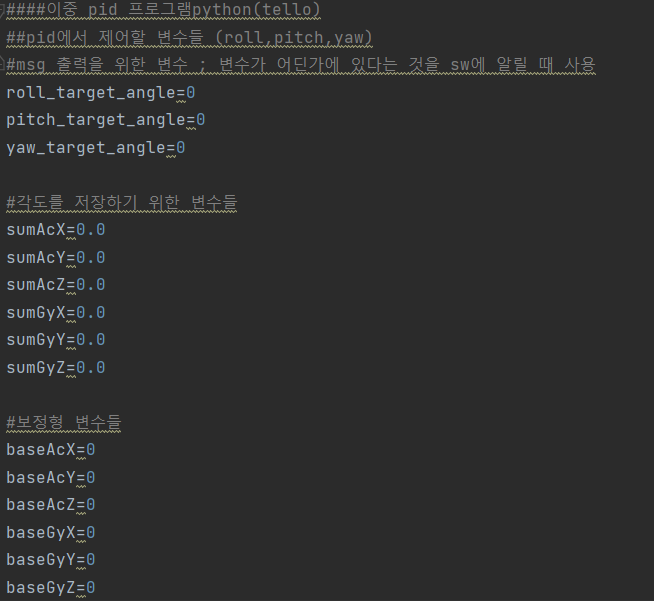
pid 프로그램에서 계산시 필요한 변수들입니다.
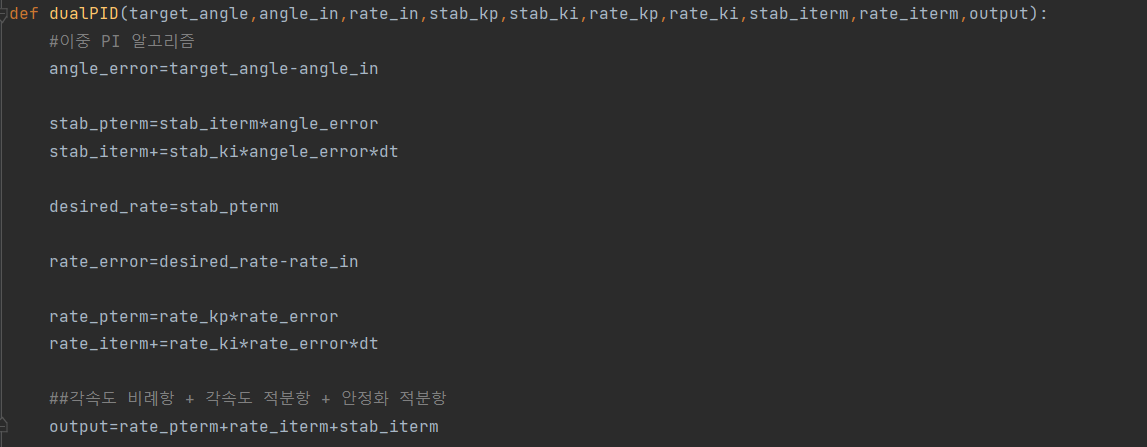
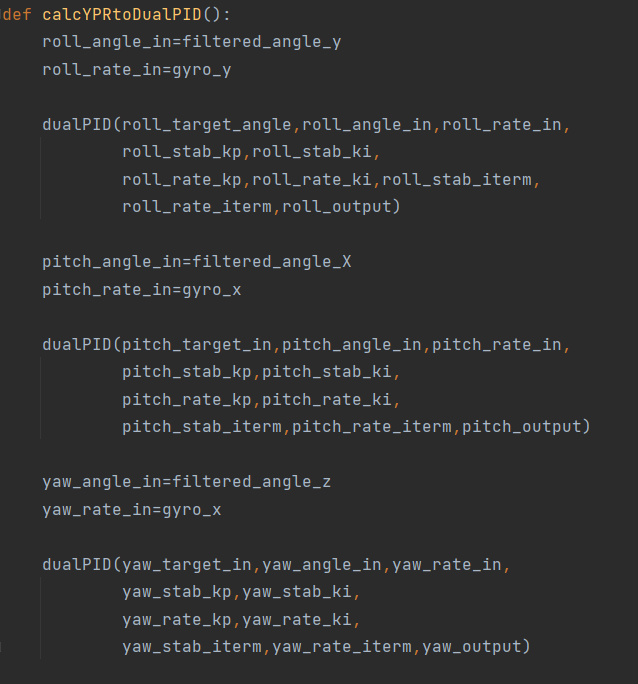
이중 PI를 구현하고 계산하는 부분입니다.
실행 결과

영상을 보면 알 수 있지만, 프로펠러 가드를 밀어서 외부 요인을 주었을 때 외부 요인에 밀려났다가도 다시 제자리로 돌아오는 것을 확인할 수 있습니다!!!!!

혹시나 물 위에서 작동이 안될까 팀원 언니가 직접 집 욕조에 물을 받아 직접 테스트도 해보았습니다 ㅎㅎㅎ

기대효과
SeeSea는 감시 범위를 입력받은 후, 이를 바탕으로 여러 대의 드론이 감시 사각지대가 없도록 최적의 위치에 배치되기때문에 설정된 위치에 안정적으로 위치하는 것이 중요합니다.
PID 제어로 인하여 물 위에서도 안정적인 비행이 가능해짐으로써 바닷바람과 같은 외부 요인에도 안정적으로 감시를 진행할 수 있을 것이라 예상합니다.
텔로 에듀로 프로젝트를 진행하는 누군가에게 도움이 되기를 바라며....
이상으로 이중 PI를 이용한 텔로 에듀 위치 제어 포스팅을 마무리하도록 하겠습니다.
안뇽 !!!
'🎈capstone' 카테고리의 다른 글
| PID 제어를 이용한 드론의 위치 제어 (1) | 2022.11.24 |
|---|
