안녕하세요 블로그는 오랜만이네요..
입학 어제 한 것 같은데..벌써 졸업 프로젝트를 하고있답니다....
시간 너무 빠르다 난 아직 아긴데!!
각설하고 진행하고 있는 주제에 대해 간단히 이야기해보자면,
드론을 통해 실시간으로 해수욕장의 상황을 분석한 후,
물에 빠진 것 같은 사람을 탐색하여 드론으로부터 거리와 함께 안전요원에게 알림을 주는
드론을 이용한 딥러닝 기반 수상 안전 요원
을 주제로 프로젝트를 진행하고 있답니다!!
실시간 영상 분석에는 YOLO v5를 사용할 예정이며
드론은 PID 제어와 최적화된 위치에의 배치를 통해
사각지대 없이 감시를 진행하고자 합니다.
저는 오늘 그 중에서도 드론의 제어에 대해 작성해보려고해요!
보통 드론을 이용한 프로젝트라고 하면, 자율 주행 드론을 많이 떠올리실텐데요,
저희는 일반적인 드론의 운영 방법과 다르게
최적화된 위치에 고정적으로 위치하여((호버링)) 감시하는 목적으로 드론을 사용합니다!
여기서 호버링이란, 아래의 커비가 공중에서 위치 이동 없이 떠있는 것처럼 제자리에서 정지 비행하는 것을 말합니다.

이거 움짤 쪄오느라 시간 좀 걸렸다는..
PID 제어
저희는 이 호버링을 안정적으로 하기 위한 방법을 찾아보던 중, PID 제어에 대해 발견하게 되었습니다.
PID는 많은 제어 방법 중 기본이 되는 제어 방법으로 새로운 제어방법과의 성능을 비교할 때
기준으로 사용할 만큼 대표적인 제어 방법이라네요! .
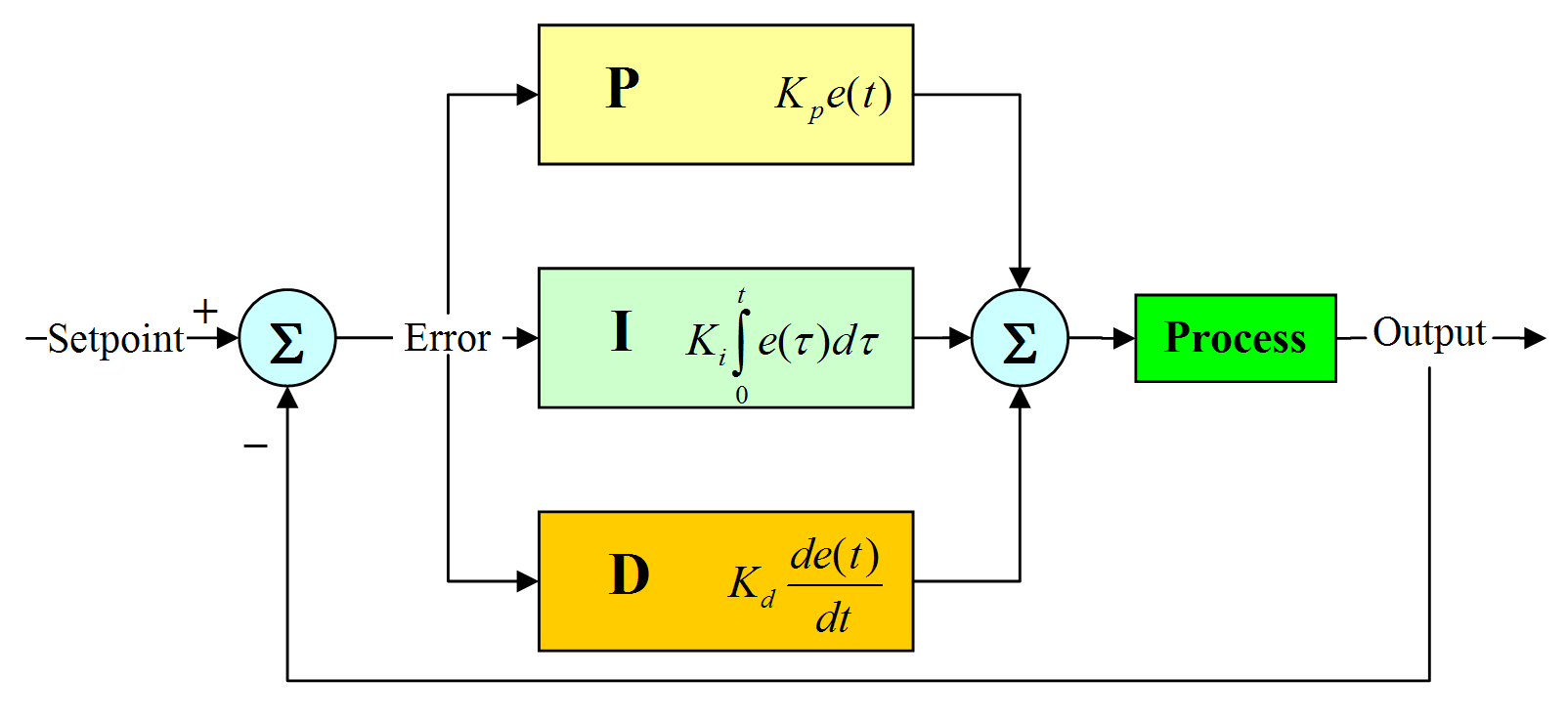
PID 제어는 비례-적분-미분 제어라고도 하며 위와 같이 피드백 구조로 이루어져있습니다.
오차 값에 대해 각 제어를 진행한 후,
그 아웃풋을 바탕으로 또 제어를 진행하여 목표치에 도달할 수 있도록 하는 것이죠!
드론의 목표 위치와 실제 위치의 차이를 Error라고 정의할 때,
Error가 커질 수록 더 큰 제어가 Error가 작을 수록 미세한 제어가 필요한데
PID 제어에서는 P(비례), I(적분), D(미분) 값을 이용하여 제어의 정도를 조절합니다.
- P 제어 (Proportional, 비례 제어)
P 제어는 오차를 계산하고 그 값에 Kp를 곱하여 오차에 비례하게 제어량을 조절하는 가장 직관적인 제어방법입니다.
드론을 작동시켰을 때, 초반 오차가 클 경우 오차를 빠르게 줄여줄 수 있습니다!
아래 수식을 보면 특별히 복잡한 것 없이 상수에 오차값만 곱하여 얻는 제어값임을 알 수 있습니다.
$${P=K_{p}*Error}$$
- I 제어 (Integral, 적분 제어)
P 제어는 초반 오차를 효율적으로 줄일 수 있으나, 오차가 줄었음에도 계속해서 에러에 비례하여 제어값을 부여하기 때문에 오히려 목표 위치를 넘어서는 현상(오버슈팅)이 발생합니다.
이러한 현상을 방지하고 P제어로 해결하지 못하는 오차를 보완하기위한 방법이 I제어 입니다.
오차의 적분값에 비례해서 제어하면서 남은 오차를 제어하기 때문에 특정 값을 목표로한다면 효과적인 방법입니다.
저희 프로젝트에는 효과적인 제어 방법이 되겠죠!
$${I=K_{i}*\int_{0}^{t}Error dt}$$
- D 제어 (Derivative, 미분 제어)
D 제어는 오차의 변화량에 비례하여 제어하는 방법으로 일반적으로 안정성을 높이기 위해 사용하는 제어방법입니다.
오차의 변화가 크다면 더 큰 정도로 조정하여 변화가 급격하게 나타나지 않도록 하는 원리이죠!
다만, 미분값은 예측할 수 없기 때문에 샘플링 시간이 짧거나 외부 충격으로 인한 갑작스러운 변화에 의해
미분 값이 튀는 경우가 발생할 수 있습니다.
$$D=K_{d}*\frac{de}{dt}$$
다시 정리해보자면,
초기에 목표치에 빠르게 도달하기 위한 P 제어
남아있는 오차를 줄이기 위한 I 제어
안정성을 높이기 위한 D 제어가 존재하며
값들을 조합한 것이 PID 제어입니다.
$$u(t)=K_{p}*Error(t) + K_{i}*\int_{0}^{t}Error dt + K_{d}*\frac{de}{dt}$$
각 제어를 적당한 게인값으로 적용한 결과를 보면 순차적으로 제어가 진행됨에 따라
목표치(1)에 더욱 안정적으로 접근한다는 점을 확인할 수 있습니다.
게인값 튜닝
위의 식에서 확인할 수 있듯이 각 제어값을 알아내기위해 상수를 사용하는데요 이를 게인값이라고 부르며 이 게인값을 어떻게 설정하는지에 따라 PID 제어의 효율이 결정된다고 할 수 있습니다.
그럼 이 게인값은 어떻게 설정한는 것이 가장 효율적일까요? 보통 게인 튜닝은 여러 번의 시행착오를 직접 겪어가면서 각 시스템에 맞는 최적의 값을 찾아나가는데요, 그 전에 게인값의 변화에 따라 예상되는 output을 고려하여 적절한 값을 찾아가볼 수는 있겠죠@.@ 이를 표로 나타낸다면 아래와 같이 작성할 수 있습니다.
| 초기 도달 시간 | 초과량 | 도달 시간 | 최종 오차 | 안정성 | |
| Kp 증가 | 감소 | 증가 | 소량 증가 | 감소 | 불안정 |
| Ki 증가 | 소량 감소 | 증가 | 증가 | 매우 감소 | 불안정 |
| Kd 증가 | 소량 감소 | 감소 | 감소 | 조금의 변화 | 안정 |
저희는 속도도 중요하지만, 해당 위치에 지속적으로 머무르는 것이 드론의 주된 기능이기 때문에
안정성에 더욱 중점을 두고 리서치를 진행하였습니다.
이러한 제어의 안정성은 진동을 바탕으로 표현할 수 있으며 크게 세가지로 분류할 수 있습니다.
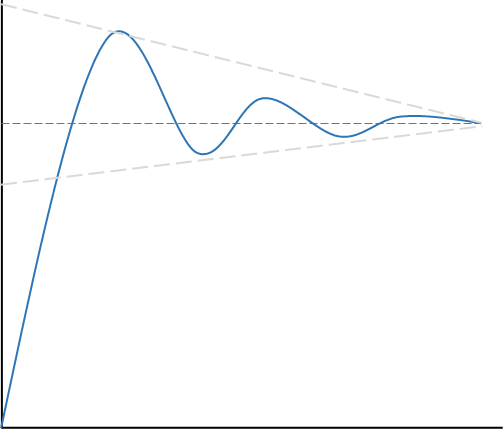
왼쪽 그림을 보면, 진동이 점점 작아지면서 목표값에 도달하는 것을 볼 수 있습니다. 이러한 경우를 안정되었다고 하며
PID 제어의 이상적인 목표가 이와 같다고 할 수 있습니다.
이러한 진동 수렴을 제어하는 것이 바로 D 제어 입니다.
진동 수렴
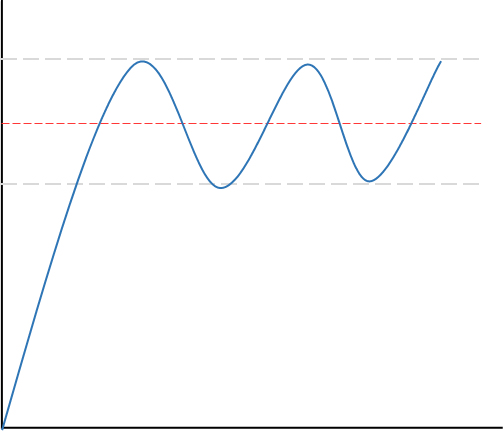
이번 그림에서는 진동이 일정하게 유지되는 모습을 볼 수 있는데요,
이는 중립 안정 상태라고 부릅니다.
명칭 자체는 안정된 상태를 이르는 말이지만,
그렇다고 좋은 제어라고 하기는 어려울 것 같죠?
진동 유지
마지막으로 이 그림에서는 진동이 점점 커지며
발산하는 모습을 볼 수 있습니다.
이러한 경우를 불안정 상태라고 말하는데요
여기서 주의해야 할 점은 I 제어가 게인값의 잘못된 튜닝이나 급격한 외부의 충격으로 인해 값이 커지게 된다면,
오히려 이와 같은 진동 발산이 일어날 수 있다는 것입니다.
이러한 발산을 막지 위해 적분 값을 초기화 하는 등의 기법이 존재합니다.
진동 발산
지글러 니콜스
이제 본격적으로 게인값 튜닝에 대해 이야기해볼텐데요 보통 튜닝은 직접 노가다😥를 하면서 어떤 게인 값이 최선인지 찾아본다고 하는데요, 지글러-니콜스 방법을 사용하면 더 쉽게 게인값을 튜닝할 수 있답니다!
지글러 니콜스가 제시한 튜닝 방법에는 계단응답곡선과 주파수 응답 방법으로 총 2가지 방법이 있습니다.
각 방법에 대해 소개해볼게요
- 계단응답곡선
이 방법은 단위 계단 함수를 사용하는 방법인데요,
단위 계단 함수(unit step function)은 특정 값보다 작은 실수에 대해서 0, 보다 큰 실수에 대해서 1을 갖는 함수이며
해당 함수에 대한 값을 이용하여 시스템이 얼마나 빨리 반응하는지 정량화시키는 척도로 사용합니다.
계단 응답 곡선 방법은 이 원리를 이용하여 주어신 시스템에 대한 단위 계단 입력에 따른 출력 응답을 구하고,
구한 응답 곡선으로부터 계수를 구하여 해당 계수를 바탕으로 PID 게인 값을 설정하는 방법입니다.
저희는 드론에 PID 제어를 적용하는데 이 방법은 적분할 상황이 없고 안정적인 시스템에서만 사용할 수 있기 때문에
해당 알고리즘은 좋은 결과를 도출하기 어려울 것 같다고 예상되어 다른 방법을 사용하려고 합니다.
- 주파수 응답
주어진 세스템의 PID 게인 값 중 I 게인 값을 무한으로 , D 게인 값을 최하로 설정한 뒤
P 게인 값만을 0부터 점차 조절하면서 일정한 진동(위에서의 중립안정과 같은 상태)을 반복하는
임계 이득(Kcr)을 구합니다.
그 후 임계 이득으로부터 임계 주기를 구하면 그로부터 각 게인값을 설정할 수 있습니다!
위의 방식으로 값을 구한 결과, 각 제어기 종류에 따라 다음과 같은 k값이 도출됩니다!
| 제어 종류 | Kp | Ti | Td |
| P제어 | 0.5 | ∞ | 0 |
| PI제어 | 0.45 | 1/1.2 | 0 |
| PID제어 | 0.6 | 0.5 | 0.125 |
이론적으로는 위의 값이 최적의 값으로 도출되었지만, 해당 값을 대입하여도 시스템에 따라 제어가 안정적이지 않을 수 있으니, 게인 값들을 조금씩 수정하여 각 상황에 맞게 대입해주세요!
이 방식을 이용하여 저희 드론의 호버링을 진행해보았는데요,
해당 제어를 적용하니 생각보다 진동이 심하고 발열이 있어 성능이 떨어지고
주행 시간이 짧아진다는 점을 발견하였습니다.
안그래도 저희가 사용하는 tello edu 모델은 배터리를 풀충전해도 주행 시간이 12분으로 짧은편인데요,,
한번 주행하면 takeoff 함수 실행시 오류 발생으로 이륙도 못하는.. 연약한 아이가 되어버렸답니다..
찾아보니 원래 드론은 진동이 심한 비행체 중 하나라 D 제어를 사용하면서
발열이 심해지거나 오히려 불안정해지는 경우가 있다고 하더라구요!
그래서 저희가 찾아낸 해결책은 이중 PI 제어입니다!
D 제어를 제외한 대신 PI 제어를 이중으로 사용하여 PID 제어의 단점을 보완하는 것이죠~~
이중 PI 제어
일반적인 PID 제어는 피드백 구조를 가지고 있어
단일 loop를 통해 지속적으로 오차를 관리하며 목표치에 도달하기 위한 제어 방법이었는데요,
이를 이중으로 진행하여 더욱 안정적으로 만드는 것이 이중 PID 제어입니다!
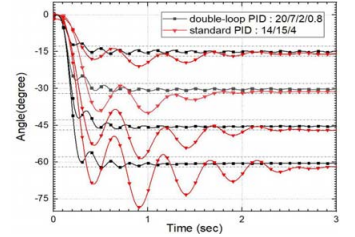
위를 보면 단일 PID 와 이중 PID 의 시간에 따른 각도 변화를 통해
이중 PID가 더 빠르고 안정적으로 위치를 제어할 수 있다는 것을 볼 수 있죠?!
*위 그래프는 리서치를 하면서 참고한 논문(The Journal of Korean Institute of Communications and Information Science)에서 가져왔습니다.
s
위에서 언급한 것처럼 저희는 D 제어를 제외하고 PI 제어를 이중으로 적용하기로 했는데요,
기존 PID 제어를 통해서는 Error값을 단순한 각도(위치) 차이로 설정하였다면
이중 PI 를 진행하면서 Error 값을 다르게 설정하게 되었습니다.
먼저 기존의 PID 제어처럼 목표 각도와 현재 각도 차이를 Error 값으로 하여 P제어를 적용합니다.
그 다음, P 제어를 한 값을 각속도 목표값으로 하여 현재 각속도와의 오차를 구해 PI 제어를 진행하면 됩니다.
단순한 각도 차이로 이루어지는 PID 제어에서는
제어에 따른 각도변화가 빠르게 일어나 효율적인 제어를 하기 어렵습니다.
그래서 각도 차이만이 아닌 각속도 차이를 통해 제어 속도를 향상시키면서
목표치에 더욱 빠르고 안정적으로 도달하게 되는 것이죠!
아래는 이중 PI 에 대한 구조도로 이해에 참고하시면 좋을 것 같네욥😉😉

다음 목표
사실 드론을 접해본 적이 별로 없어 이번 프로젝트를 진행하며
여러 제어 시스템을 접하게 되었는데 마치 기계공학과 학생이 된 것 같고 새로운 내용도 많이 배울 수 있어서
힘들었지만 신기했다네요..
PID 제어에 대한 경험이 전무하다보니 해당 알고리즘을 개념적으로 자세히 분석한 후,
게인값 튜닝이 이루어져야한다고 생각해 여러 논문, 글을 참고하다보니 예상보다 리서치 기간이 길어져
이번 포스팅이 이론(?) 위주의 글이 될 수 있겠으나 흥미롭게 봐주시면.. 좋을 것 같아요~.~
아직 이중 PI 제어를 직접 텔로에 적용해보지 못하기도 했고, 프로젝트 완성도를 위해 수정 및 보완 해야 할 부분이 많으니 계속 달려보자구요 ~~
다음 포스팅에서는 PI 제어를 적용한 결과와 최적 위치에 배치하는 모습까지 보여드릴 수 있을 것 같아요!
그러니 다음 포스팅까지 기다려 주세요~~~!😎😎
그럼 안뇽

'🎈capstone' 카테고리의 다른 글
| 🛸이중 PI로 TELLO-edu 제어하기🛸 (1) | 2023.05.16 |
|---|